Create a new project¶
Open MBsysPad
Click the menu File>New project
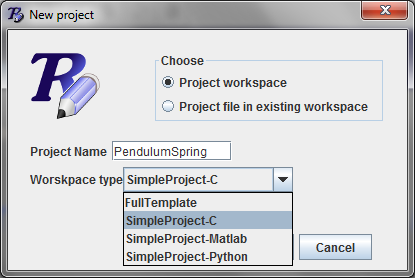
New project gui screenshot¶
Select Project workspace
This will create a new project folder in the MBproject path
Give a name to the project
For the example: PendulumSpring
Select the Workspace type
The workspace type determines which subfolders will be created in the project folder and files will be automatically copied. Those files are generally templates for the user functions and the main script.
For the example: SimpleProject-C
An empty project is open
It is possible to create a new *.mbs file in an existing project by selecting Project file in existing workspace
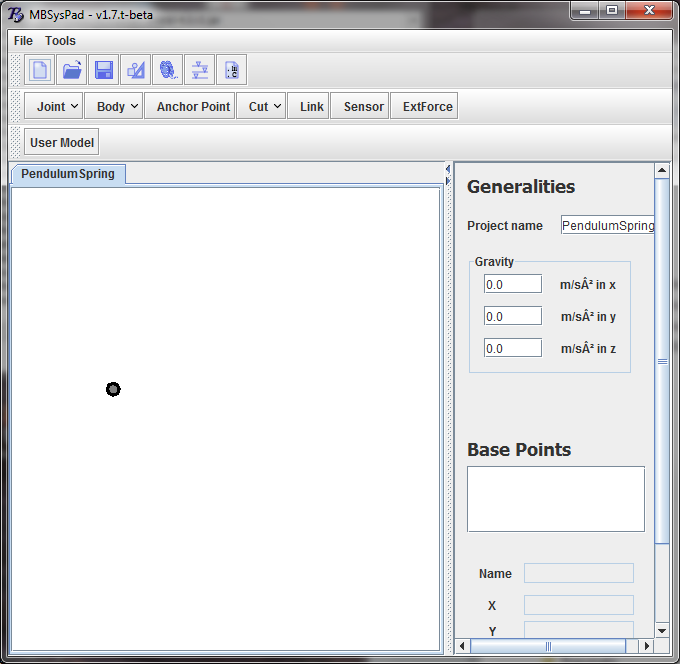
Empty project screenshot¶
Folder structure¶
A Robotran project contains the six following folders, that are related to the five steps of the Robotran modeling cycle:
Step 1: dataR : It contains the *.mbs file which includes all informations given in MBsysPad. Go there to open your data file with MBsysPad.
Step 2: symbolicR : It will contain the symbolic equations files generated by Robotran, via MBsysPad.
Step 3: userfctR : It contains all the user-defined function. The next sections of the tutorial explain how to adapt those files for the purpose of the model.
Step 4: workR : It contains your main script. Go there to run your simulation.
Step 5: animationR : It will contain the result files used for the 3D animations in MBsysPad.
Step 5: resultsR : It will contain the results files (position, velocity, acceleration, forces/torques, …) of all joints after the simulations. Theses can be used for further analysis (plots, …).
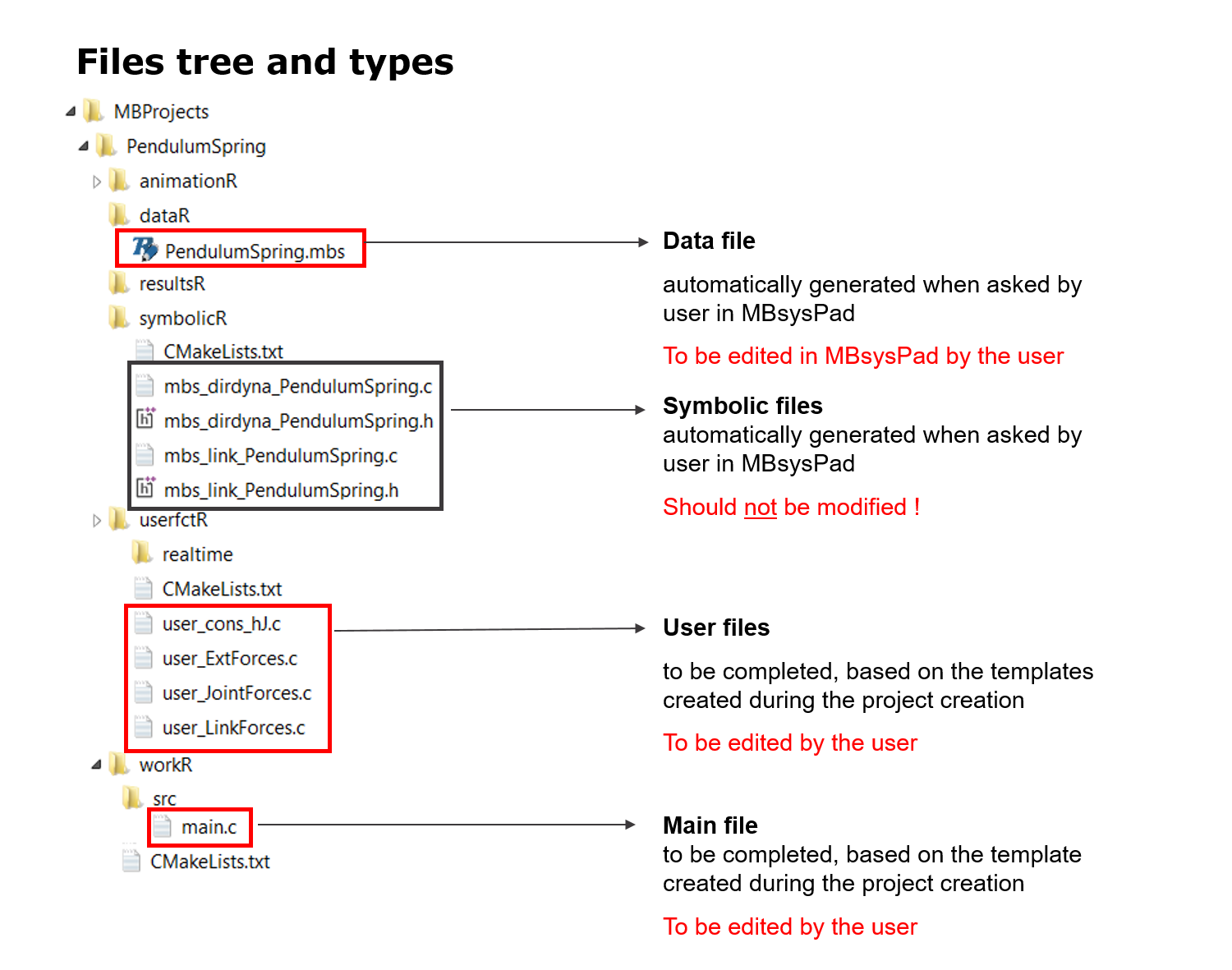
Robotran project files tree¶
On some occasions some other folders will be created. These cases are not part of this tutorial.