External forces¶
The external forces are used to impose a solicitation from the environment on to the system:
The solicitation consists of applying an external force and/or an external torque on the body;
The three components of the force and/or torque must be calculated by the user in the user_ExtForces function;
The application point is defined in MBsysPad and its kinematics is provided in the input of the user_ExtForces;
The user_ExtForces function must return:
the 3 components of the force in the inertial frame;
the 3 components of the torque in the inertial frame;
the 3 components of the application point in the body fixed frame, which allows to modify the position where the force is applied;
Each external force is associated with a “F sensor” which give the kinematics of the application point;
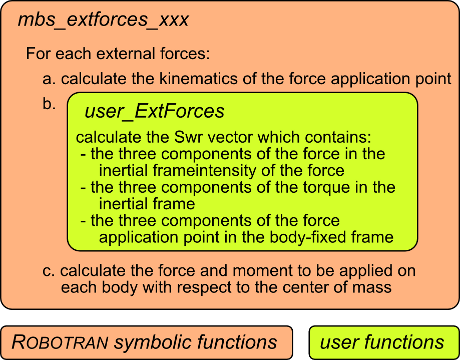
Flow chart of the function call for computing external forces¶
Back to the pendulum-spring example¶
The goal is to add a wall next to the pendulum with the following assumptions:
The end of the pendulum hits the wall;
The thickness of the pendulum is neglected;
The wall is modelled as a spring in the horizontal direction with a stiffness K = 10 kN/m.
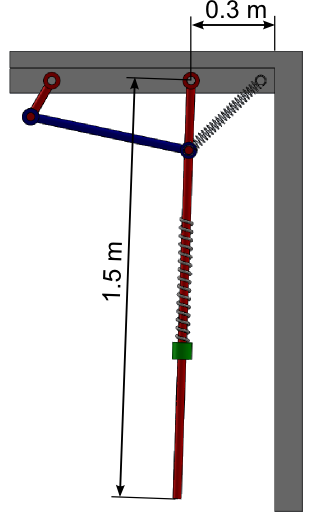
Schematic representation of the new system¶
REMARK:
Step 2, 4 and 5 are not impacted by theses modifications.
Step 1: Draw your multibody system¶
Open the Pendulum Spring model in MBsysPad;
Add an anchor on the pendulum;
Enter the coordinates to locate the point at the end of the pendulum;
Add the external force:
Click on the ExtForce button;
Click on the anchor point at the end of the pendulum;
A “F” is added next to the anchor point;
Click on the “F” to edit its properties and give it a name;
Step 2: Generate your multibody equations¶
You have to generate the multibody equations after the creation of an external force.
Step 3: Write your user function¶
Edit the user_ExtForces function (open the file from the userfctR subfolder of your project) and write the force equations.
import numpy as np
def user_ExtForces(PxF, RxF, VxF, OMxF, AxF, OMPxF, mbs_data, tsim, ixF):
#...
# get the force id
F1_id = mbs_data.extforce_id["LateralBumpstop"]
if ixF == F1_id:
gap = 0.3
if PxF[1] > gap:
Fx = -10000*(PxF[1]-gap)
#...
Swr=np.zeros(9+1)
Swr[1:]=np.r_[Fx,Fy,Fz,Mx,My,Mz,dxF]
return Swr
REMARK:
By default, the dxF components to the position of the anchor point defined in MBsysPad using the following commands (see the first commands of the user_ExtForces function):
idpt = mbs_data.xfidpt(ixF)
dxF = mbs_data.dpt(1:,idpt)
This behaviour can be modified if the force application point is moving with respect to the body (example: wheel/ground contact).
REMARK:
If there are several external forces in the model, all the constitutive laws are introduced in the user_ExtForces function and the if condition is used to distinguish the various forces.
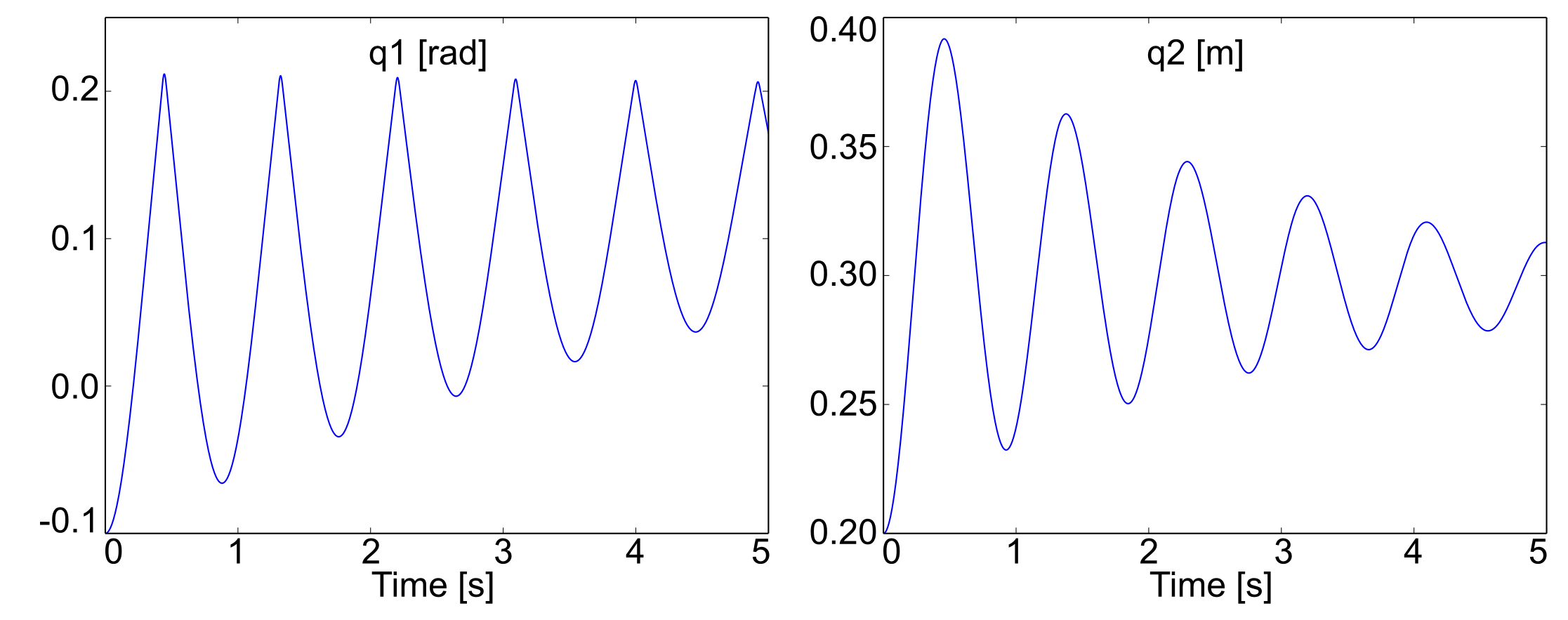
Step 4: Run your simulation¶
WARNING:
Keeping initial joint angle of 1 [rad] for pendulum leads to an initial position deep in the wall => generating high forces. This might be intractable for the simulation. To avoid this set initial angle at -0.1 [rad].