ROSbotran architecture¶
This tutorial presents the process used to execute and operate a Robotran project from ROS by connecting a laptop and a Raspberry. The final output consists of two ROS packages (named ros_rob for the Robotran project and ros_rasp for the Raspberry). These two packages can be downloaded ros_rob and ros_rasp.
Architecture
The objective of this page is to present how these two packages work together. After that, each package will be deeply presented in the next pages and instructions to use them will be given.
ros_rob package¶
This package follows the classic ROS package architecture:
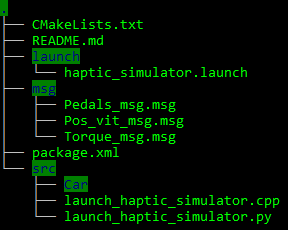
ROS Package Architecture
CMakeLists.txt file:¶
This lists the compilation instructions for the ros_rob package and includes also a link to the CMakeLists of a used Robotran project. This latter will then be read by the catkin ROS compiler which will generate a ROS executable from Robotran. The user needs to specify in this file the paths to mbsysc, ROS and Pthread librairies (see after).
launch folder:¶
The launch files allow to run multiple ROS nodes and tools in one command line when you want to execute a complete project.
msg folder:¶
It contains .msg files that allow you to create personalized messages for ROS topics in order to transport our data (in the case of Robotran it will be mainly positions, speeds, joint forces).
src folder:¶
It contains the entire Robotran project(s) (without the build folder).
main file (in the Robotran project inside src folder):¶
Uses several threads
- Executes the “classic” Robotran main, namely: loading the model static and quasi-static equilibria, modal analysis and direct dynamics (or inverse).
- Creates a ROS Publisher object to provide the necessary functions to publish the data generated by Robotran on a topic.
- Creates a ROS Subscriber object to collect data from a topic and to exploit them in Robotran.
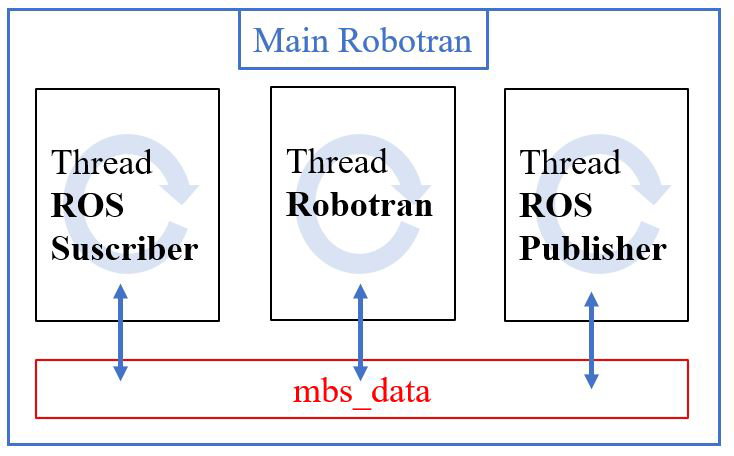
Multithreading in main
ros_rasp package¶
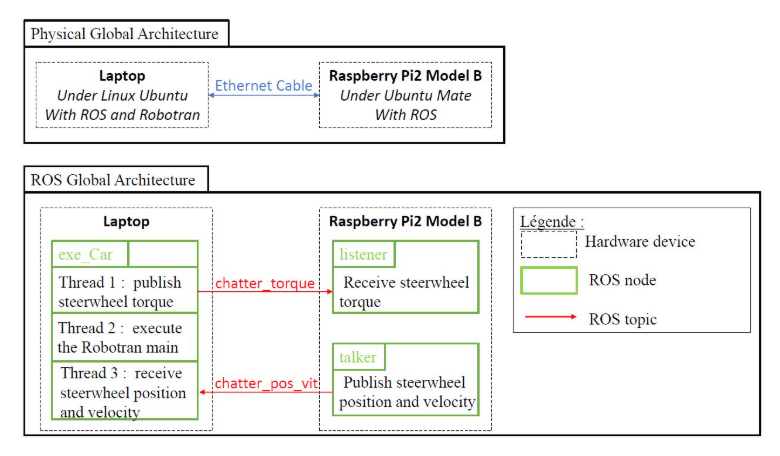
This is a ROS package which receives/publishes data for a Robotran project. Running this package alone has no interest but it can be used along with ros_rob.
In this tutorial, we present an example where you can drive a car with the left and right keyboard arrows and, thanks to a ROS topic, publish the torque which will be applied in the steering wheel. The interest is that you can run the ros_rasp package on an other device (which has ROS installed on it and a complete, bi-directional connectivity with the first device by SSH communication), for example a Raspberry Pi. Now you are able to publish data to Robotran from an external device and also receive data from Robotran to this external device.
This is ROSbotran ;-)